火灾是一种突然且极具破坏性的灾难性事件,无论地点在任何时间,都可能发生。住宅区、商业建筑和工业设施都面临着火灾爆发的风险[1]。随着现代城市经济的快速发展,各地区大型仓库数量逐渐增加,火灾事故的可能性增加[2]。火灾探测系统是降低火灾风险和损失的重要手段。如果系统检测到火灾并尽早采取措施,损失可以减少80%以上[3]。
多参数火灾探测算法主要用于烟雾、温度、可燃气体等火灾参数的数据融合。在2016年,Yan等人使用扩展神经网络融合温度、烟雾浓度和一氧化碳气体浓度这三个参数[4]。金等设计了一种贝叶斯推理融合算法,通过后验分布的熵来区分多源异常信息[5]。采用对数回归算法对阴燃实验中不同温度和燃烧材料的数据进行监督学习[6]。傅等人设计了一种采用温度传感器、浓kopm,oim 度传感器和烟雾传感器的火灾报警系统浓度传感器[7]。何等人利用温度、一氧化碳浓度和烟雾浓度作为火灾特征参数,建立了火灾探测模型。采用煤气管火、聚氨酯泡沫火、木材阴燃火和织物阴燃火进行了火灾参数实验。用水泥粉尘、香烟火和空气加热器进行了干扰实验[8]。2019年,邓等利用模糊神经网络模型融合温度、烟气浓度、CO浓度三个火灾特征参数[9]。
火灾图像检测主要采集烟雾和火焰图像。烟雾图像检测主要基于烟雾的不规则运动和灰度等特征。主要的处理方法包括小波变换、神经网络和模糊算法。火焰图像检测主要基于火焰颜色、火焰形状和动态特征。主要的处理方法包括神经网络、SVM、马尔可夫模型、专家系统等。在2013年,M. Mueller等人使用运动估计器来区分火灾运动特征和其他运动类型,并且他们提出了OMT和NSD的两个新的光流估计[10]。2014年,S. Verstockt等人提出了基于深度和振幅图像的火焰检测方法[11]。2015年,P. Foggia等人分析了火焰颜色、形状变化和运动等。,并设计一个多专家系统来探测火灾[12]。K. Dimitropoulos等人建立了具有各种时间和空间特征的火灾行为模型,如颜色、闪烁和空间能量[13]。2016年,C. E. Prema等人提出了一种检测烟雾多种特征的方法,该方法由三个阶段组成。在第一阶段,基于YUV颜色空间分割烟雾区域。第二阶段,使用纹理分析提取时空特征。在第三阶段,提取的特征数据用于训练支持向量机分类器[14]。2019年,陈等人建立了双目空间变换模型对火焰进行定位[15]。Yang等人提出了基于逻辑回归集成模型的火焰识别算法[16]。Jiang等人使用多频照相机,例如红外、近红外和可见光,来收集烟雾和火焰图像[17]。
在消防技术公司出版的特刊《消防工程中的智能系统》中,许多相关研究使用机器学习算法进行火灾探测[18]。例如,Ryder等人描述了分层的时间记忆连续学习方法如何使用传感器数据来确定建筑物中的火灾状态[19]。Abid等人的总结了机器学习算法在预测和检测森林火灾中的应用[20]。图像火灾探测技术可以有效地提供火灾预警,获取火灾强度和位置信息。但当相机被意外遮挡,或空间中的火焰高,那么相机得到变色传感器的位置将是一个错过或误警报。此外,基于图像的火灾定位系统更加昂贵,需要开发复杂的算法来排除其他灯光对视频图像处理系统的干扰,以避免误报,这对以牺牲救援时间为代价提高图像算法的准确性毫无意义[21]。
为了弥补基于图像的火灾探测技术的缺点,采用传感器数据进行了分析。由于在火灾的早期阶段释放了大量的烟雾,烟雾传感器可以有效地响应潜在的火灾,并提前火灾报警器的时间[22]。当物体燃烧时,大量的热量随着烟雾被释放出来,导致周围的温度升高,温度传感器可以检测到[23]。Xia等人提出以平行双线气体传感器阵列的形式在火灾空间上放置气体传感器,并通过计算气体传感器在不同位置探测燃烧气体的时延来定位火源[24]。但是,如果空气中含有大量的水蒸气和粉尘,就会影响到烟雾传感器,增加火灾报警的误报率。Thomas et al.提出了一个火源定位模型和边界条件通过分析温度场分布和热空气的流动特征在密闭空间和完成了火源的远场定位使用温度传感阵列和相关方法估计信号时间延迟[25]。当火源相对接近传感器阵列时,所获得的火源位置更为准确,但当火源远离传感器阵列时,火源定位的精度大大降低。
另外研究人员已经提出了几种技术。其中一种类型使用图像处理和计算机视觉来高精度地检测和分割火灾。这些技术将火焰图像转换为色彩空间, 例如YCbCr或 YUV , 然后通过将像素值与某些阈值进行比较,将其像素分类为火焰或非火焰[26][27]。这些方法总是应用于公共场所或高覆盖率区域,但在室内环境中,会有一些角落是摄像机无法覆盖的。在室内环境中,隐私也是一个考虑因素。
另一种类型的技术使用大量传感器进行火灾探测。这些方法从气体、烟雾、火焰或温度检测器获取值,并将这些值与某些阈值进行比较。它们用于小区域,但总是通过简单地设置火灾检测阈值来发生错误。深度学习技术为研究人员提取了最能代表火灾的相关特征提供了很大帮助。深度学习已成功应用于图像分类、自动驾驶、自然语言过程等多个领域[28-30]。
对于基于多传感器的解决方案, L. Maheshwari等[31]提出了一种物联网 (IoT) 网络,使用可编程软件、传感器、电子设备和通信设施来传输和存储数据。近年来,物联网 (IoT) 已应用于智能家居、智能农业和智能医疗保健等各个领域[32][33]。使用物联网对火灾探测系统的多种类型的研究[34][35]。V.K.Singh提出了一种基于 Arduino UNO 的系统, 该系统连接到MQ-2烟雾传感器、UVTRON 火灾传感器和SIM900[36]。
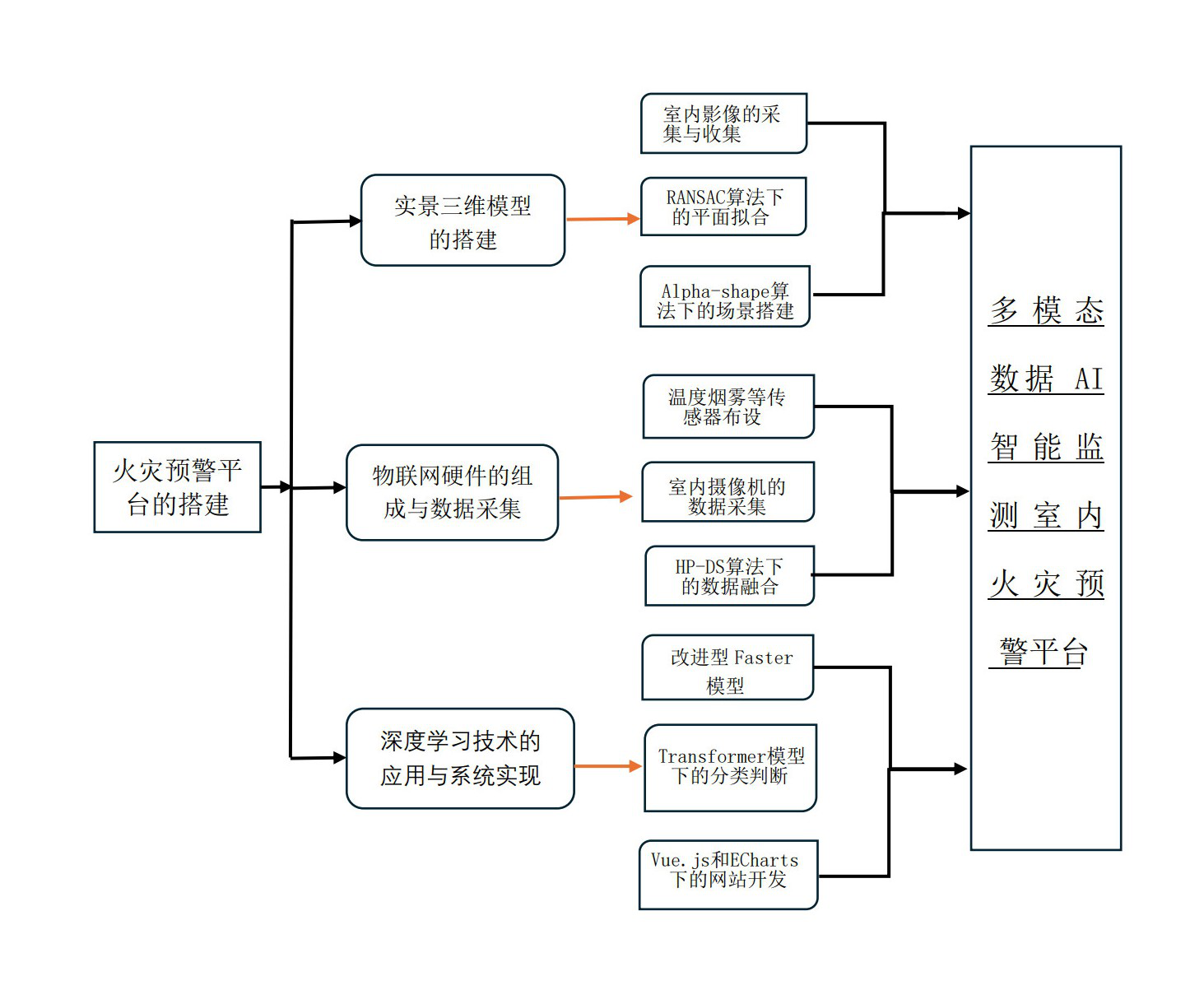
通过对国内外相关领域的总结分析得出结论,基于物联网的室内环境监测系统在迅速发展,但系统还只是趋于单一的数据监测和分析管理,精度依然无法达到预期效果,这还是无法满足对早期火源的监测与定位,因此本项目结合深度学习技术在利用数据模型训练优化使用方面的优势,提出新型的智慧环境监测控制系统,这项研究在满足监测需要的情况下具有一定的现实意义。
[1] 科杜尔,V.;库马尔,P.;拉菲,M.M.建筑物火灾危险:审查、评估和提高消防安全的策略。 PSU 资源。 2019 年修订版,4, 1-23。 [交叉引用]
[2] J消防工程师第15(3):145-172。https://doi.org/10.1177/ 1042391505049437
[3] C.贾成,火灾探测算法的信息处理[D],南方中国科技大学,2012。
[4] Y.郝,魏体春,h .辛欣,x .玉柱,基于可拓神经网络[J],传感器。微囊肿。35 (6) (2016) 113–116。
[5] J.单春华,温,朱志刚,基于数据融合的火灾预警研究具有正态分布的贝叶斯网络[J],计算机学报。第33 (5)号决议(2016年)1473–1476。
[6] Z.邢,x .,z .,多特征数据融合嵌入式火灾预警预警系统[J],计算机应用,2018,p. S1。
[7] F.凌锐,宁伟,丁志强,基于多传感器的火灾报警器设计信息融合[J],计算机。Meas。控制26(1)(2018)206–212。
[8] H.基于模糊神经网络的火灾算法研究[J],消防科学。技术。37 (10) (2018) 1432–1436。
[9] D.李文,李晓军,基于模糊的智能火灾探测方法研究神经网络[J],消防科学。技术。38 (4) (2019) 522–525。
[10] 米(meter的缩写))Mueller,P. Karasev,I. Kolesov,A. Tannenbaum,光流估计视频中的火焰检测[J],IEEE Trans .图像处理。22 (7) (2013) 2786–2797。
[11] 南刘建民,等.基于多模态飞行时间的火灾探测[J].多媒体。工具。申请69 (2014年)313–338。
[12] 页(page的缩写)Foggia,A. Saggese,M. Vento,用于视频监视的实时火灾探测使用基于颜色、形状和运动的专家组合的应用程序[J],IEEE Trans。Circ。系统。视频技术。25 (9) (2015) 1545–1556。
[13] K.Dimitropoulos,P. Barmpoutis,N. Grammalidis,时空火焰模拟和自动动态纹理分析[J],IEEE Trans .Circ。系统。录像技术。25 (2) (2015) 339–351。
[14] C.E. Prema,S . S . vins ley,S. Suresh,YUV颜色烟雾的多特征分析早期森林火灾探测的空间[J],火灾技术。52 (5) (2016) 1319–1342。
[15] C.基于空间的薛军图像型火灾探测器坐标定位方法转换[J],Instrum。技术。传感器11(2019)122–126。
[16] Y.基于图像的火灾探测系统的研究与实现基于嵌入式[D],上海东华大学,2019。
[17] J.基于图像的隧道火灾探测技术与创新识别与分析[J],城市道路、桥梁与防洪7 (2019)239–243。
[18] Naser MZ,劳滕伯格C,科里戈夫斯基E(2021)“消防工程中的智能系统”特刊。消防技术第57(6):2737-2740。https://doi.org/10.1007/s10694-021- 01196-w
[19] (2021)用于火灾状态确定的层次时间记忆连续学习算法。消防技术。https://doi.org/10.1007/ s10694-020-01055-0
[20] Abid F(2021)对基于森林火灾预测和检测系统的机器学习算法的调查。消防技术:57:559-590。https://doi.org/10.1007/s10694-020- 01056-z
[21] 中国B等人(2013)视频火灾检测-回顾。数字信号处理器ARevJ23:1827-1843。https://doi.org/10.1016/j.dsp.2013.07003
[22] 陈思杰,霍夫德特区,彼得森卡,马歇尔AW(2007)使用烟雾和气体传感器进行火灾探测。火灾SafJ42(8):507-515。https://doi.org/10.1016/j.firesaf.2007.01.006
[23] T(2005)使用温度传感器阵列的火灾定位信号处理算法。火灾SafJ40(8):689-697。https://doi.org/10.1016/j.firesaf.2005.06.004
[24] 15.(2008)利用双线气体传感器阵列的火源定位方法研究。发表在: 2008年第7届世界智能控制与自动化大会,第5862-5865页。电器和电子工程师学会https://doi.org/10.1109/WCICA.2008.4592827
[25] 16.Kaiser T(2000)带有温度传感器阵列的火灾探测。第34届2000年国际卡纳汉安全技术年度会议。No. 00CH37083)。IEEE出版社,第262-268页。https://doi.org/10.1109/CCST.2000.891198
[26] T. Celik 和 H. Demirel,“使用一种方法在视频序列中进行火灾检测”通用颜色模型,《消防安全杂志》,第 44 卷,第 2 期,第 147-158 页,2009 年。
[27] G. Marbach, M. Loepfe 和 T. Brupbacher,“图像处理视频图像中的火灾检测技术”,“消防安全杂志”,第 41 卷,第 4 页,第 285-289 页,2006 年。
[28] [4] 赵志强,郑鹏,徐思涛等,“基于深度学习的目标检测:一篇综述,“IEEE 神经网络与学习系统杂志,” 30(11), 3212–3232, 2019.
[29] 刘磊,欧阳伟,王翔,等,“深度学习在通用物体检测:一项调查,《国际计算机视觉杂志》,128(2),261–318, 2020.
[30] S. Minaee, Y. Boykov, F. Porikli, A. Plaza, N. Kehtarnavaz & D. Terzopoulos. “基于深度学习的图像分割:综述,” arXiv预印本 arXiv:2001.05566,2020 年。
[31] 马赫什瓦里,J. Janet,S. Jeevanandham,S. Kausic,和 M. Manish,“基于物联网的 GPS 坐标森林火灾警报系统,”J. Phys.《会议录》,第 1916 卷,第 1 期,2021 年。
[32] T. Mangayarkarasi,K. Umapathy,A. Sivagami,和 D. Subitha,“物联网基于安全装配点警报系统”,见《J. Phys.》会议论文集《会议录》,第 1964 卷,第 7 期,2021 年。
[33] I. Ehsan,“基于区块链的农业食品概念模型”供应链系统,”2022 年卷,2022 年。
[34] 希拉里,R. 罗蒂奇,P. 乔治,A. 萨姆,“A. 早期火灾探测系统坦桑尼亚市场。”在《第七届国际电子会议论文集》中。传感器与应用会议;MDPI:瑞士巴塞尔2020;第 2 卷,第 50 页。2020。
[35] 卡梅利亚,L.;伊萨姆,N.;费尔曼沙亚,A.A. “火灾灾害早期检测系统在住宅区。”J. Phys. Conf. Ser. 2019,1402,044001.2019。
[36] V. K. Singh,《基于物联网的消防系统自动化》(物联网):综述,“国际科学研究工程势”,第 5 卷,第 1354-1356 页,2019 年。