2025年批次
视界立维--基于激光雷达与视觉耦合的空间三维重建
学生申报
创新训练项目
工学
计算机类
学生来源于教师科研项目选题
一年期
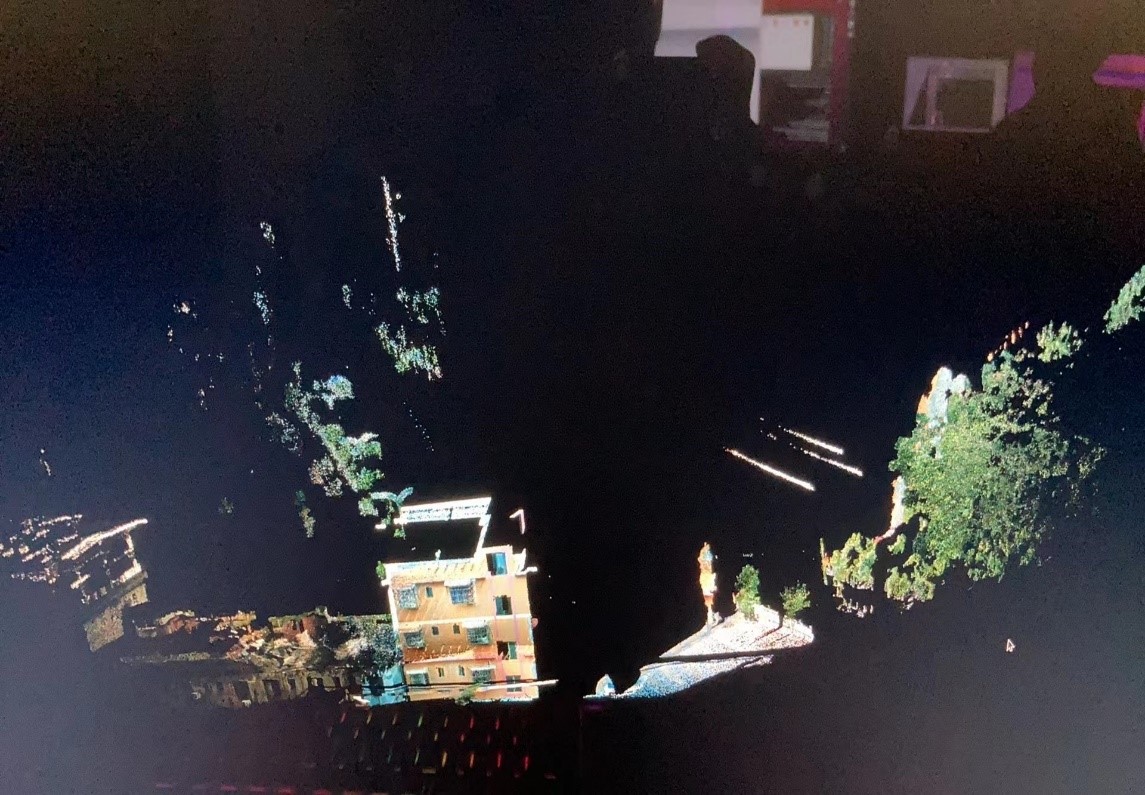
文化遗产保护是全球共同面临的重大课题。作为文明古国,我国拥有大量珍贵的文化遗产。然而,随着时间的流逝和环境的影响,许多古文化遗迹遭到不同程度的破坏和损毁。为了完整、精细地记录文物信息并实现长期保存,现代科技的引入成为不可或缺的重要手段。作为SLAM(即时定位与地图构建)技术的重要分支,该系统融合视觉惯性系统(VI)和雷达惯性导航系统(LI),在三维建模领域实现实时场景更新,并便于模型导出与后期处理。
当前,轻量级手持SLAM在古文物修复与保存领域的应用尚处于起步阶段,存在点云重叠、定位精度低及后期处理复杂等问题。这些瓶颈显著增加了时间成本,且定位漂移往往导致建模需多次修复。我们的产品针对以上痛点,通过精密的传感器融合技术与智能算法优化,显著提升了建模效率与质量,为古建筑修复及文化遗产保护提供了可靠的技术保障。我们的产品采用了ESIKF框架,采用顺序更新来解决激光雷达和视觉测量之间的尺寸不匹配问题,提高了鲁棒性。大大减少了激光雷达与视觉的点云重叠,以及定位飘移,我们的系统还能结合多种传感器(RTK、GPS等)拓展性高,后期升级维护成本小。
SCI三区第三作者TITLE = {Unsupervised Low-Light Image Enhancement Based on Explicit Denoising and Knowledge Distillation},URL = {http://www.techscience.com/cmc/online/detail/22159},
(1)2017年11月14日 桂林理工大学课题《基于目标管理的高校资助工作绩效考核研究—以桂林理工大学为例》,课题编号GUT17FB05 2019年9月结题,参与。
(2)2017年11月14日 桂林理工大学课题《“双一流”视域下大学生就业服务精准化模式探究—基于5所“双一流”高校的调查分析》,课题编号GUT17FB06 2019年9月结题,主持。
(3)2018年12月20日 桂林理工大学课题《大数据视域下广西高校校园文化创新途径研究》,课题编号GUT18FB05 2019年9月结题,参与。
(4)2019年12月 学校共青团“4+3”青春成长工程品牌培育项目A类《高台舞狮—桌椅上的龙狮盛宴》结题 2016年立项,主持。
(5)参与广西自然科学基金面上项目《含激电效应的可控源电磁法正反演成像、最优化观测系统及应用研究》项目编号:2018GXNSFAA050070,参与。
(6)参与2020年度广西本科教改工程项目《“新工科”视域下地方高校测绘地理信息专业群建设与实践》(重点项目),参与。
(7)2019年度广西高校中青年教师科研基础能力提升项目《大型音乐舞蹈史诗的舞蹈比较研究—以《东方红》《中国革命之歌》《复兴之路》为例》项目编号:2019KY0998,参与。
(8)2020年11月16日 桂林理工大学课题《自媒体环境下高校大学生意识形态教育的机制构建研究》,课题编号GUT20FC09,参与。
(9)2021年度广西高校中青年教师科研基础能力提升项目《岩溶区微重力测量精细地形校正空间域高效算法研究》项目编号:2021KY0272,参与。
(10)2021年6月3日郑州市2021年度社会科学调研课题立项《构建郑州多元高层次文创产业投融资机制研究》项目序号:0722;2021年12月25日结题;结题证书时间:2022年6月20日证书编号:ZSJX20220985,参与。
(11)2020广西重点实验室项目立项《基于人工智能的LTCC高通滤波器的设计研究》项目编号:2020-2-1,参与。
(12)参与2022年浙江省教育科学规划研究课题《共同富裕背景下浙江省产教融合激励制度研究》,参与。
(13)参与2021年广西高等教育自治区级教学成果一等奖《“三融合三协同”的计算机类本科人才培养质量提升研究与实践》桂教高教【2021】65号/证书号G-Y-2021077,参与。
(14)参与2023年广西旅游职业教育教学改革研究项目立项《旅游演艺业态创新背景下广西旅游职业院校音乐表演专业人才培养的探索与实践》项目编号:2023LYHZWY008,参与。
(15)参与2024年度广西高校中青年教师科研基础能力提升项目《基于视觉深度学习的室内移动机器人路径规划研究》项目编号:2022KY0252,参与。
对该项目的技术方面提供支持,指导项目的研究方向
区级