2025年批次
智能故障定位:融合麦克风阵列与视觉感知技术
学生申报
创新训练项目
工学
电子信息类
学生自主选题
一年期
随着工业自动化和智能设备的广泛应用,机器设备的故障诊断与维护成为保障生产效率和设备可靠性的关键环节。传统的故障检测方法多依赖于单一传感器的监测,如温度、振动或电流传感器,虽然有效,但在复杂环境中,尤其是设备故障源难以明确定位时,这些方法的局限性愈加明显。
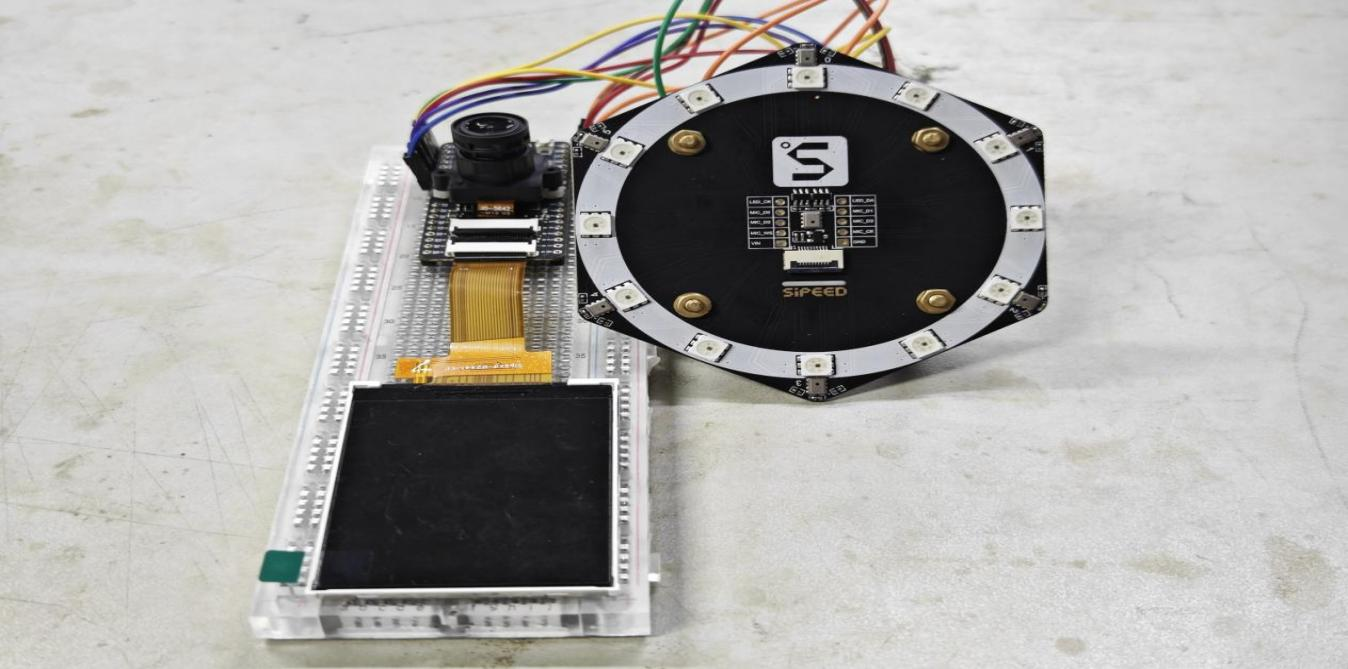
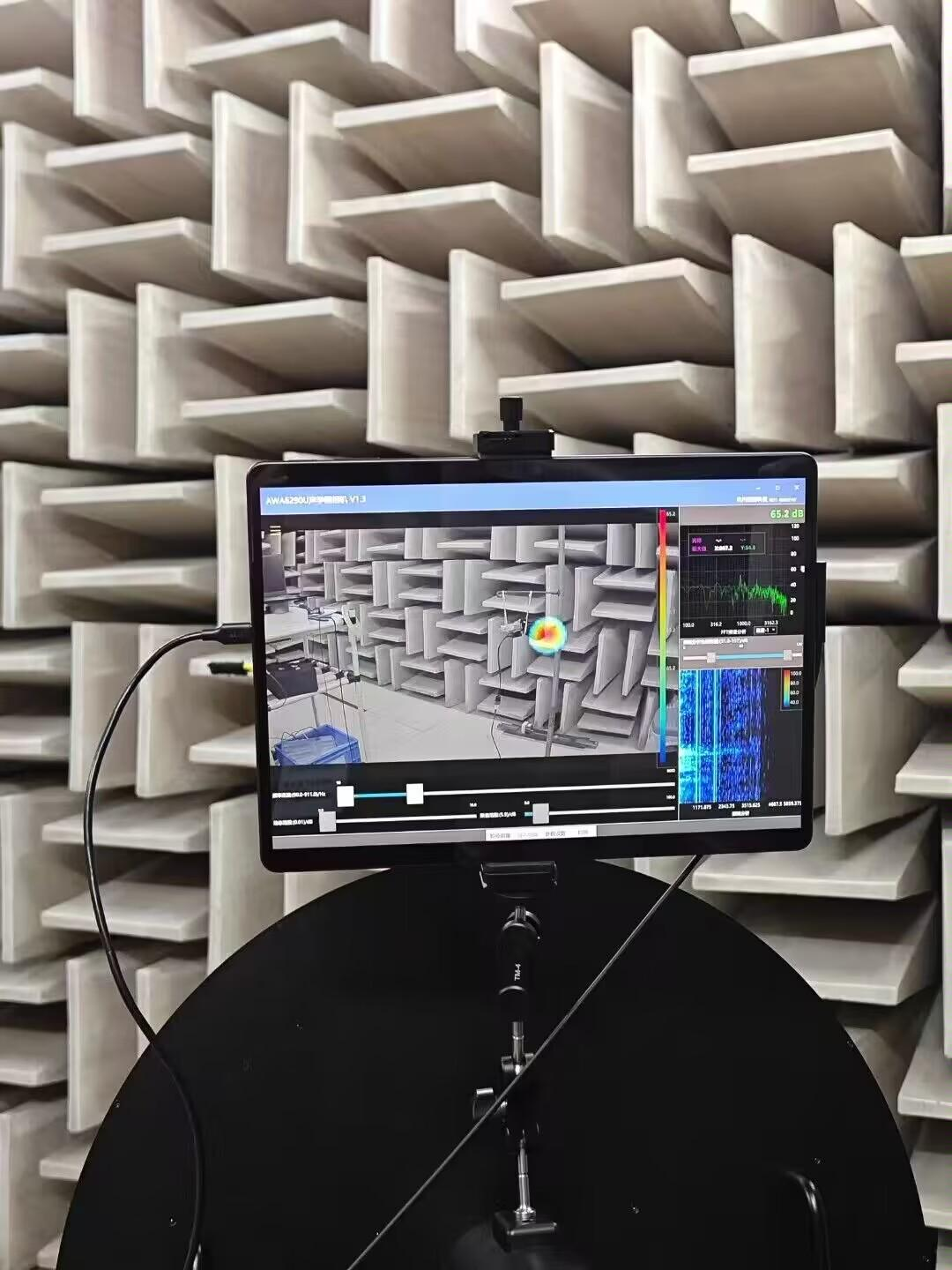
本项目旨在开发一种基于麦克风阵列和摄像头的智能故障定位设备,融合声学信号和视觉信息,精确定位机器故障发生的位置。麦克风阵列可以通过捕捉设备发出的声音信号,分析声源的方向与强度,从而识别故障信号。而摄像头则通过实时图像捕捉,帮助确认声源位置并进一步分析设备的状态。通过这两种传感器的数据融合,我们能够更加精准地识别故障发生的具体位置,尤其是在噪声较大的工业环境中,依靠单一音频信号定位往往不够精确,因此视觉辅助将显著提高定位的准确性。
这一技术不仅能够显著提升设备维护效率,减少人工干预,还能够在实际应用中适应不同类型的设备与工作环境,具有较强的通用性和灵活性。通过这种基于多模态传感器的故障检测与定位方法,企业将能够提前发现潜在的故障隐患,降低设备停机时间和维修成本,进一步提高生产线的安全性与可靠性。
2023年自治区级大学生创新训练项目,已结项
2024年自治区级大学生创新训练项目
2024年国家级大学生创新训练项目
中国国际大学生创新大赛(2024)“数广集团杯”广西选拔赛铜奖
2024大唐杯 全国大学生新一代信息通信技术大赛国家级二等奖
2024全国大学生数学建模竞赛省级一等奖
两篇普刊论文
主持并参与国家级科研项目3项,省部级科研项目3项,主持承担水利部企业委托重大横向课题1项,参与广西科技进步二等奖、三等奖各1项;第一作者或通讯作者发表核心论文40余篇,其中SCI、SSCI、EI收录30余篇,中文核心近10篇;发表教改论文4篇;第一作者发明人申请发明专利60多项,授权50余项,40余项发明专利实现科技成果转化。
国家自然科学基金:异构多核处理器的微内核嵌入式实时操作系统关键技术研究,参与
国家自然科学基金:嵌入式实时操作系统微内核体系结构及IP核方法研究,参与
广西“尖峰”专项:平陆运河方向子课题,主持
广西重点研发项目:基于车灯的光物联接入的智能小区车辆管理系统的研究开发,主持
重大横向课题:船舶过闸智能管理系统技术开发,主持
横向课题:单片机与嵌入式系统,主持
技术转化:基于物联网的结构形变检测方法,主持
技术转化:可见光通信复用调制天线法,主持
1.提供实验及测试平台
2.提供相应的项目进展指导
区级