2025年批次
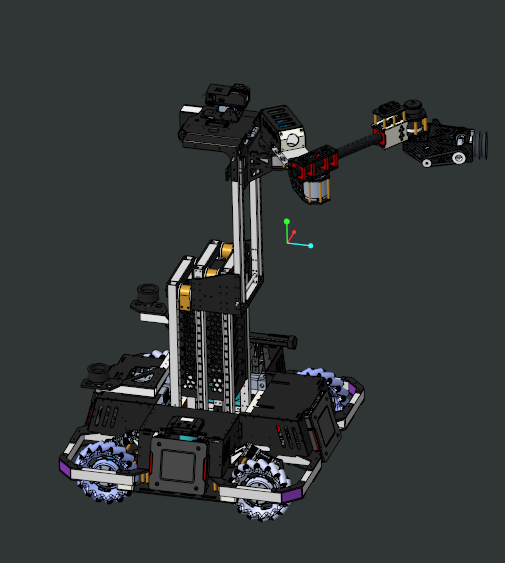
运斤成风——智能物流搬运机器人
学生申报
创新训练项目
工学
机械类
学生自主选题
一年期
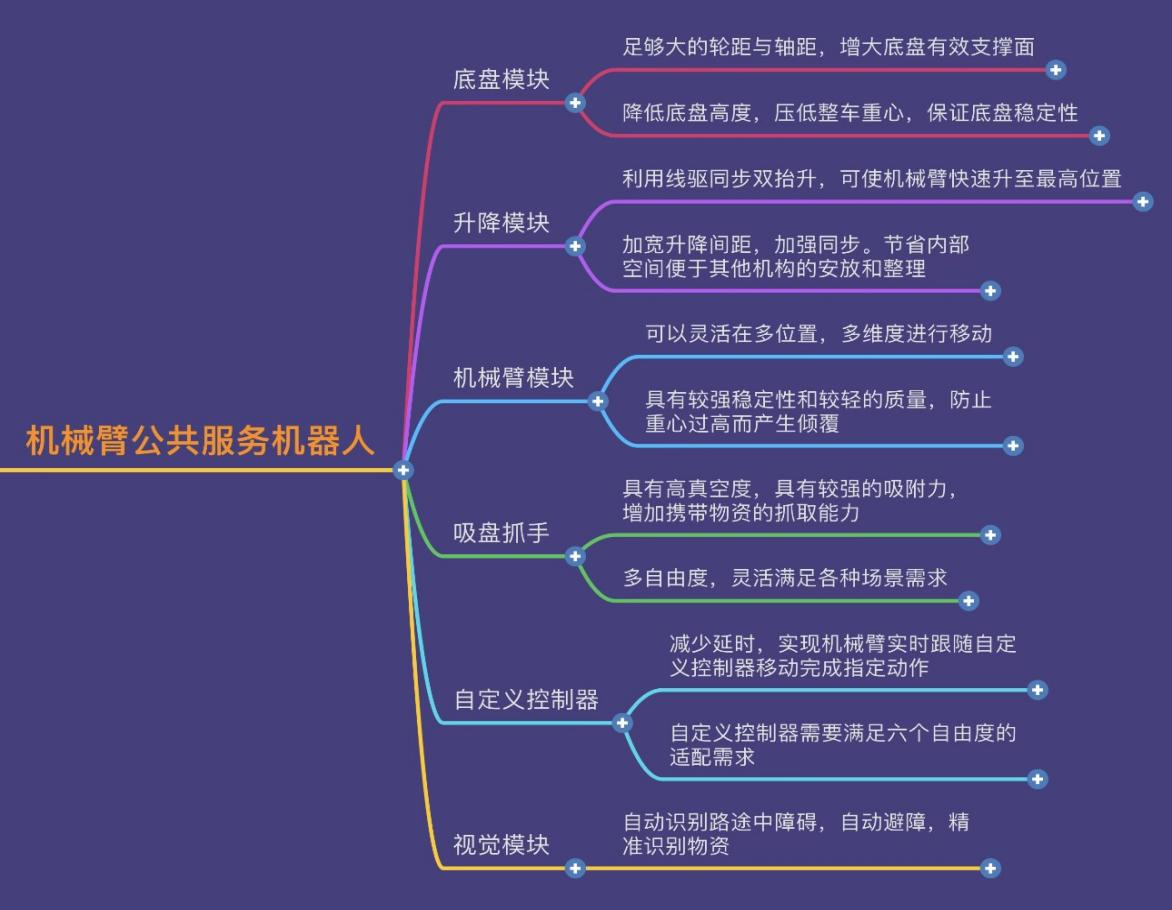
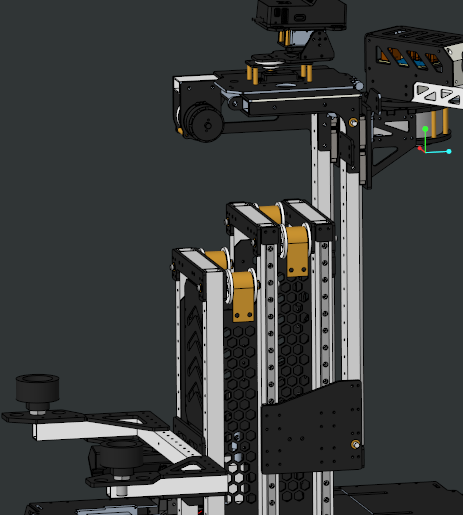
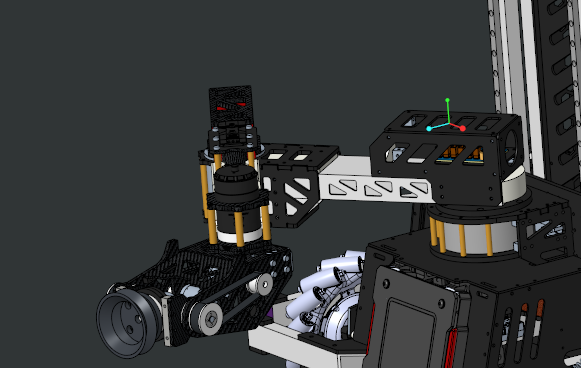
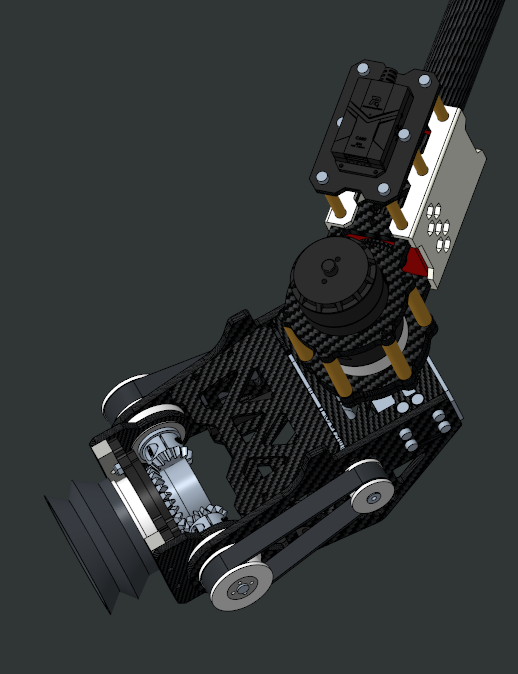
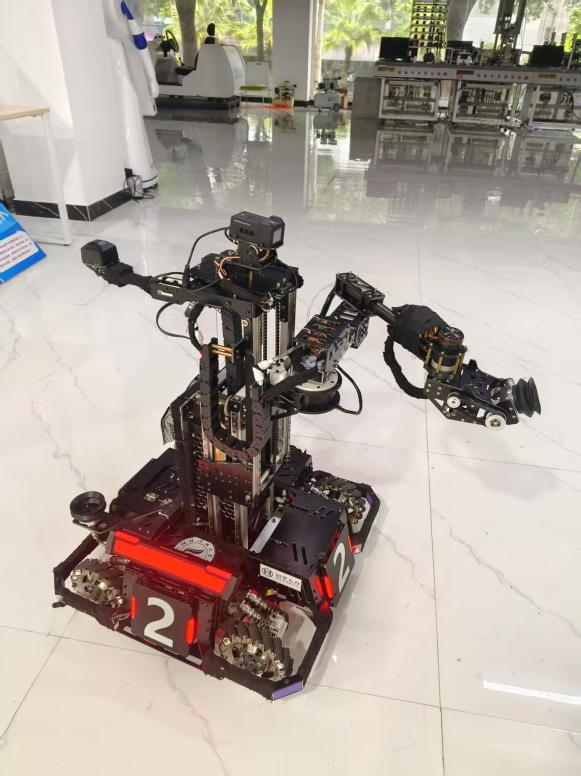
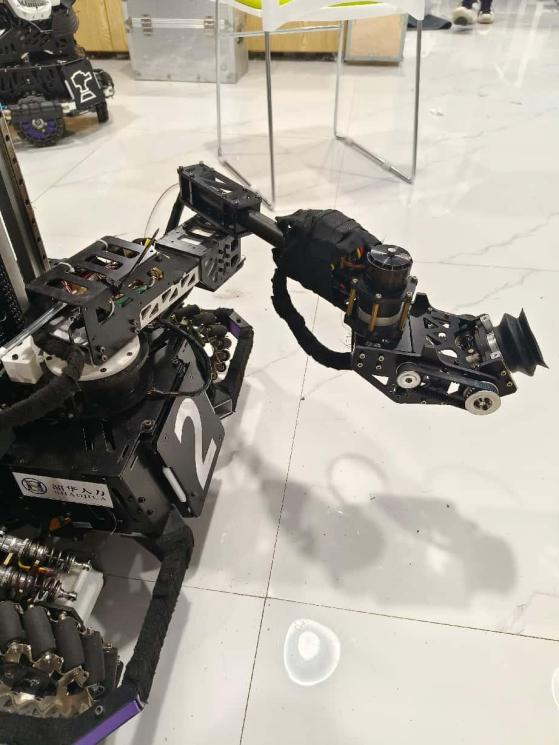
“六自由度多功能机械臂”的研发,为提供公共服务便利带来了巨大的潜力。这种机械臂具有多个关节,能够360度旋转抓取,适用于公共服务等领域。这种高精度、多输入多输出的机械臂也在工业制造中扮演着关键角色,特别是在工业装配领域,能够完成精细组装工作,提高生产线的效率和产品质量。
机械臂在工业制造业中的应用非常广泛,包括装配和搬运、焊接和喷涂等任务。例如,在汽车、电子、机械等行业中,机械臂可以精确地抓取和放置零件,完成复杂的装配任务,从而提高生产效率和产品质量。此外,机械臂还可以用于快递包裹的分拣和供包,通过视觉识别系统实现无序堆叠快递包裹的精确抓取和放置。
多功能机械臂公共服务小车不仅能够方便公共服务,还能在工业生产中发挥重要作用。例如,它可以用于取包裹等任务,减少人力成本,提高工作效率。这种小车的研制和应用,展示了团队在科技创新和实际应用中的能力,推动了智能化和自动化技术的发展。
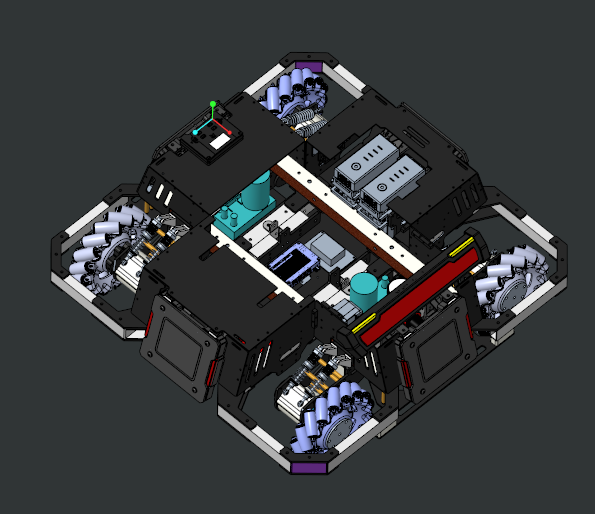
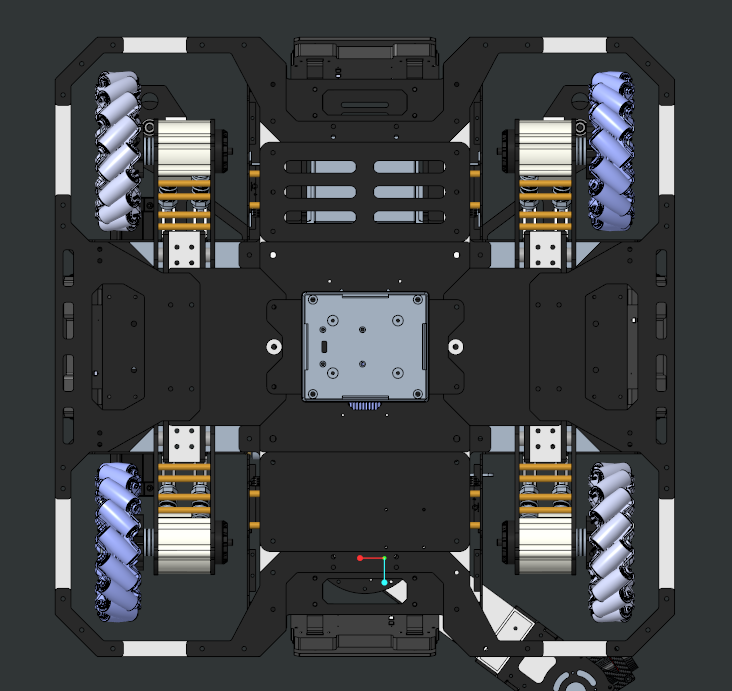
本项目整合先进导航、自主感知、智能决策和高效机械臂,打造智能物流机器人,可实现智能避障、精准抓取货物。利用大数据和云计算优化路径规划,替代部分人工操作,提高效率。
“第二十二届全国大学生机器人大赛RoboMaster2023 机甲大师超级对抗赛·全国赛”中,获三等奖
“第二十二届全国大学生机器人大赛RoboMaster2023机甲大师超级对抗赛·区域赛(南部赛区)”中,获二等奖
全国三维数字化创新设计大赛全国二等奖
全国三维数字化创新设计大赛广西赛区一等奖*2
2025年中国大学生工程实践创新能力大赛铜奖
新型实用专利-基于拓扑优化低惯量的二轴机械臂
新型实用专利-一种可替换式机械臂前端
[1] Yizhen Zhu, Dylan Joralmon, Weitong Shan, Yiyu Chen, Jiahui Rong, Hanyu Zhao, Siqi Xiao, Xiangjia Li.3D printing biomimetic materials and structures for biomedical applications[J]. Bio-Design and Manufacturing.2021, 4(2): 405-428.
[2] Zeng Yushun,Jiang Laiming,Sun Yizhe,Yang Yang,Quan Yi,Wei Shuang,Lu Gengxi,Li Runze,Rong Jiahui,Chen Yong,Zhou Qifa. 3D-Printing Piezoelectric Composite with Honeycomb Structure for Ultrasonic Devices[J]. Micromachines.2020, 11(8): 713.
[3] Xiangjia Li,Weitong Shan,Yang Yang,Dylan Joralmon,Yizhen Zhu,Yiyu Chen,Yuan Yuan,Han Xu,Jiahui
Rong,Rui Dai,Qiong Nian,Yang Chai,Yong Chen. Limpet Tooth‐Inspired Painless Microneedles Fabricated by Magnetic Field‐Assisted 3D Printing[J]. Advanced Functional Materials. 2021, 31(5): 2003725.
[4]荣家辉.节流装置及空调器:ZL202122334903.1[P].2022.04.15
[5]徐朝阁,荣家辉.一种夹具的容装装置及冷藏冷冻装置:ZL202022795578.4[P].2021.08.24
[6]徐朝阁;荣家辉.用于空调器的分流装置及空调器:ZL202122487039.9[P].2022.06.14
[7]于翰武,荣家辉.衣物处理设备:ZL202122189493.6[P].2022.08.23
[8]陈贇豪,荣家辉.热水器的控制方法、装置:ZL202210761018.8[P].2024.01.09
[9]荣家辉.电子膨胀阀及应用电子膨胀阀的空调器:ZL202122320373.5[P].2022.04.15
[10]王德平,荣家辉.空调器中室内机防止凝露的控制方法及存储介质:ZL202110844241.4[P].2021.10.29
指导老师在项目推进期间,长期提供技术指导以及资金支持,对于项目实现方法以及技术难点突破进行点拨以及研究,提供对应的平台进行支持,提供项目启动的资金以及推进的所需物资。
校级